507 words
3 minutes
[CS5446] Reinforcement Learning Generalization
CAUTIONProblem: Tabular representation cannot scale big
Two solutions:
- Function Approximation
- Policy Search
Function Approximation
- compact representation of true utility function
- input: states
- output: utility value
- better generalization
Linear Function Function Approximation
- Use Linear function to approximate
Approximate Monte Carlo Learning
- Supervised learning
- update parameters after each trial
- L2 loss:
- Update:
- for each parameter
Approximate Temporal Difference Learning
- a.k.a semi-gradient
- Utility:
- Q-Learning:
NOTEApproximate MC / TD are similar to MC / TD but is calculated for each parameters, multiplied by its gradient.
Issues
- The deadly triad
- may not converge if: function approx + bootstrapping + off-policy
- Catastropic forgetting:
- happen when over-trained, forget about the dangerous zone (訓練太久後,只訓練 optimal path,就忘記危險的地方。之後若走到那邊容易出事)
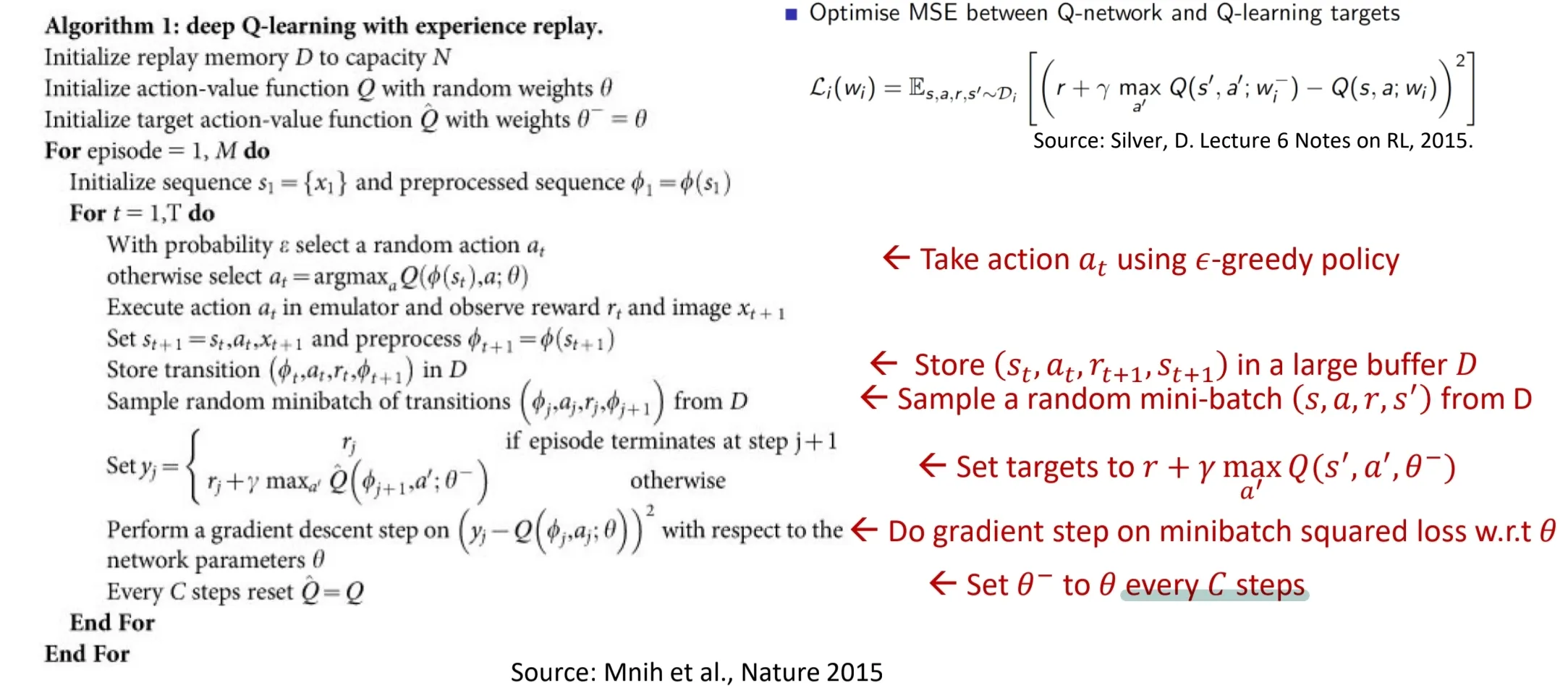
- Solution: Experience Replay
- Replay trials to ensure utility function still accurate for parts no longer visited
Non-Linear Function Approximation
- deep reinforcement learning, use gradient descent for back propogation
- Deep Q-Network (DQN)
- uses experience replay with fixed Q-target
Policy Search
- (find good policy)
- Problem:
- if max, else .
- discrete, cannot use gradient
- Solution: Stochastic Policy (probability)
- Use Softmax function differentiable
- use gradient descend to update
NOTEPolicy search estimates the policy function, but only care if it leads to optimal policy, doesn’t care whether the estimation is close to true utility.
- REINFORCE
- Monte-Carlo policy gradient
- high variance => use baseline (center the return to reduce variance)
- Advantage function , where is the baseline
Problem of policy gradient
- unstable returns bad updated FAIL!
- wants to restrict the update (限制每次更新的變動範圍)
- Solution: Minorize Maximization
- use a simpler objective (is the lower bound of the true one) to replace the true one .
- result of is guaranteed to , therefore we maximize
- maximize the simpler objective
- guarantee monotonic policy improvement
- use a simpler objective (is the lower bound of the true one) to replace the true one .
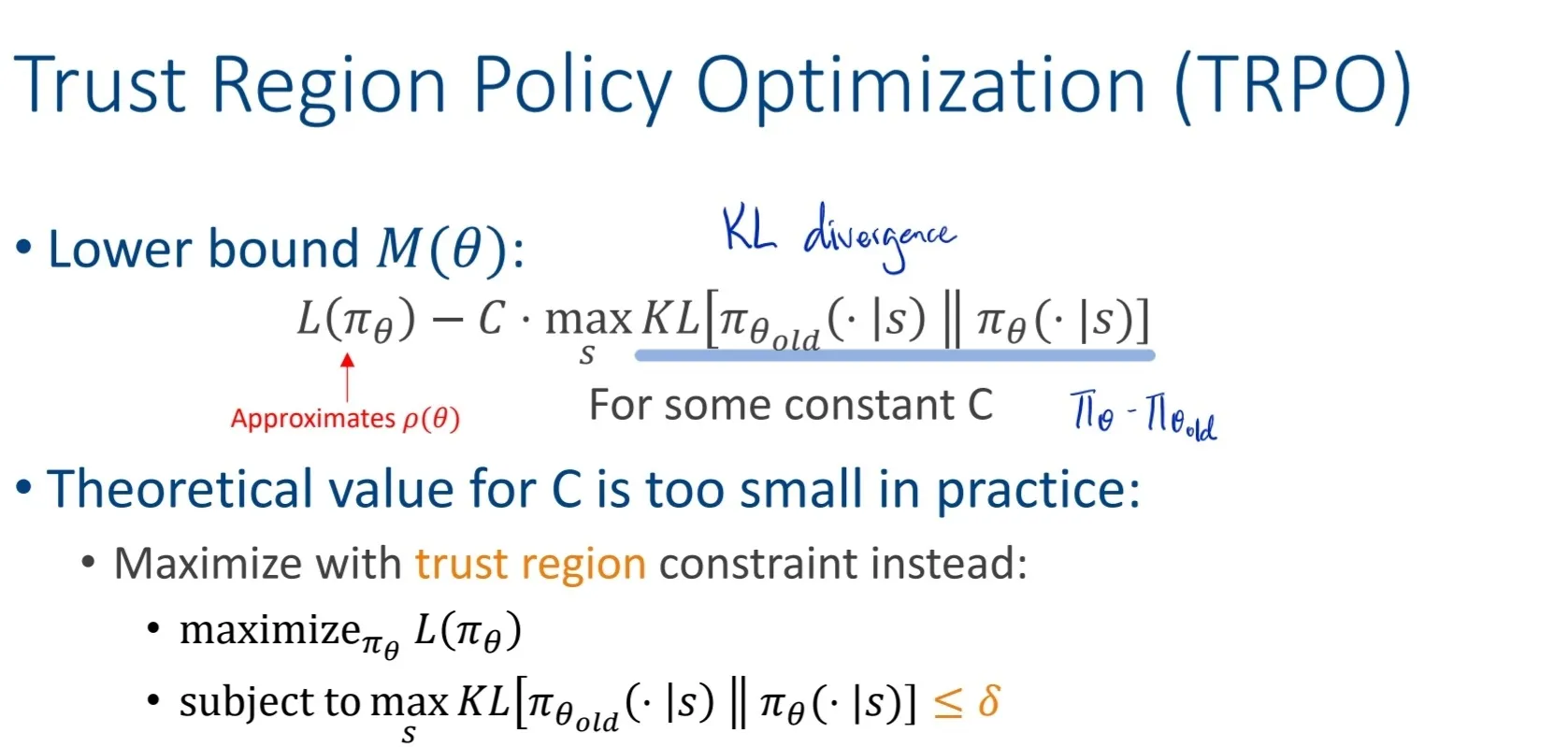
Trust Region Policy Optimization (TRPO)
- uses lower bound (KL divergence) to limit the change per update, to ensure that the update is gradual and stable, moving toward the optimal action
- the max KL diverge to
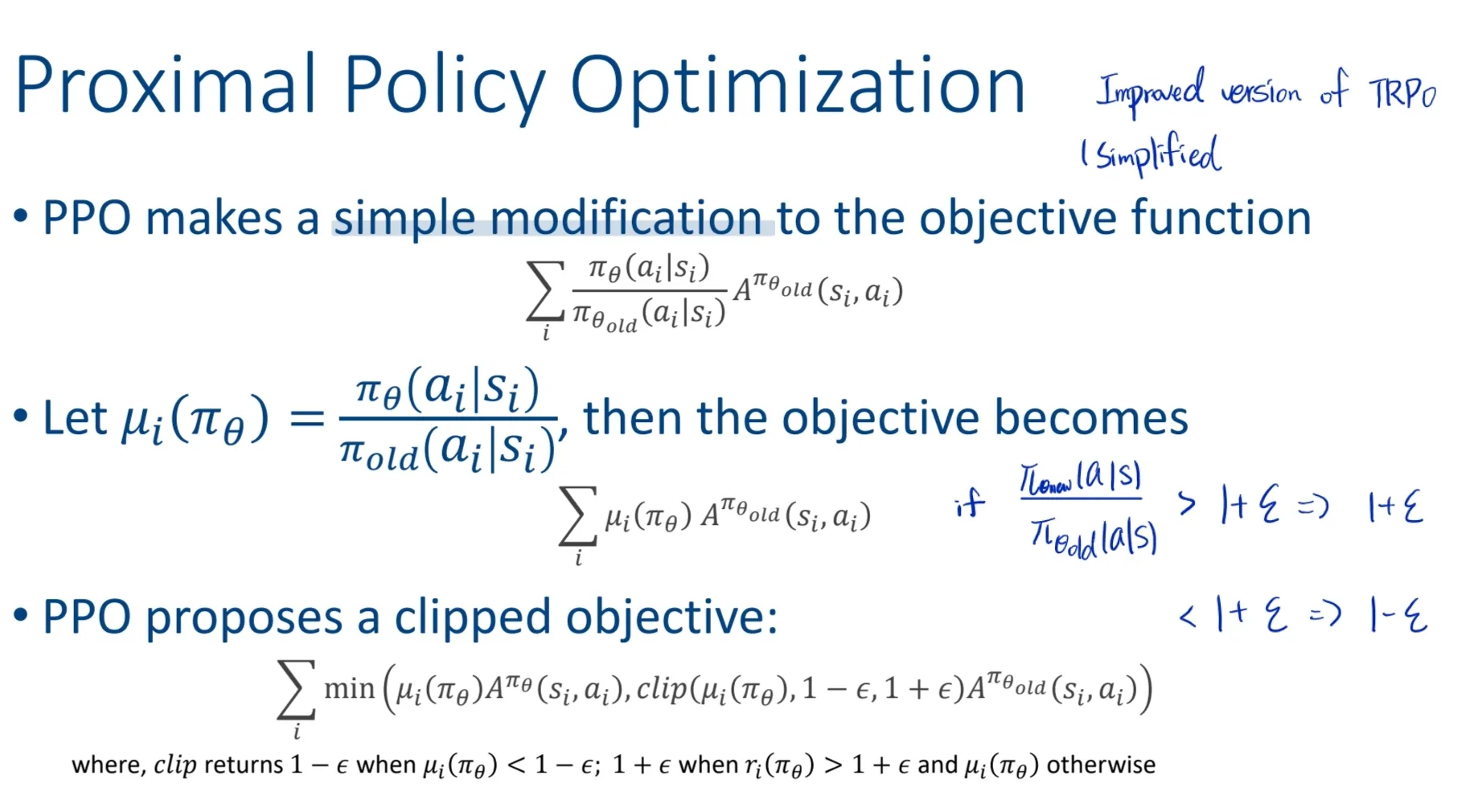
Proximal Policy Optimization (PPO)
- TRPO is too computationally complex
- uses clipped objective to limit updates
- must be in the range of
- if , then clip to
- if , then clip to
- 限制update的幅度介於 之間
Function approximation Policy search
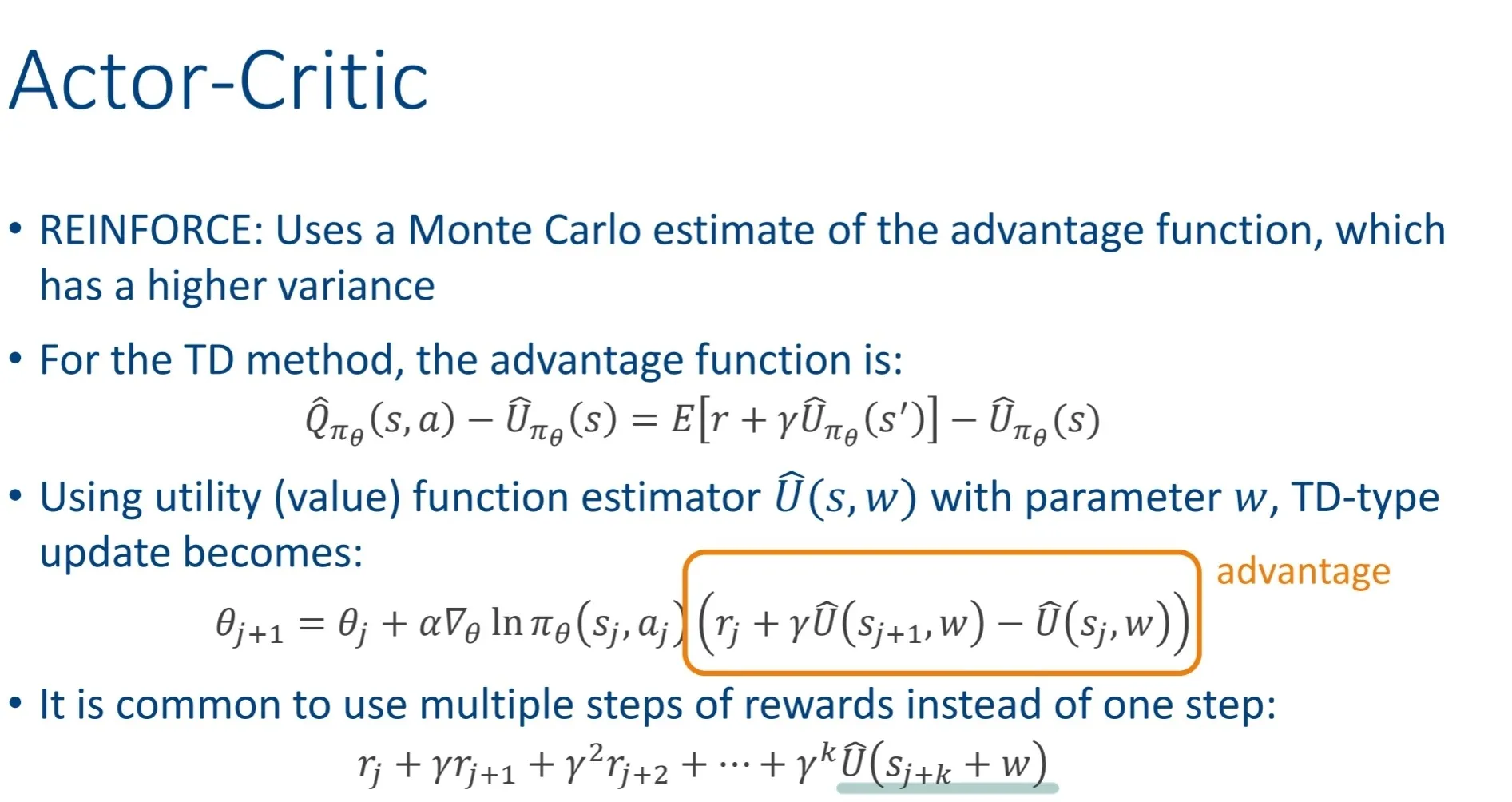
- Actor-Critic methods
- To estimate both utility and policy
- Learns a policy (actor) that takes action
- Also learns an utility function (critic) for evaluating the actor’s decisions
- The actor is running policy search
- The critic is running value-function approximation
- Actor adjusts policy based on feedback from critic (using policy gradient)
- The advantage estimate shows how much the currect policy is better than the average.
- The policy gradient update is
[CS5446] Reinforcement Learning Generalization
https://itsjeremyhsieh.github.io/posts/cs5446-6-reinforcement-learning-generalization/