164 words
1 minutes
[CS5242] Stable Diffusion
Image Generation
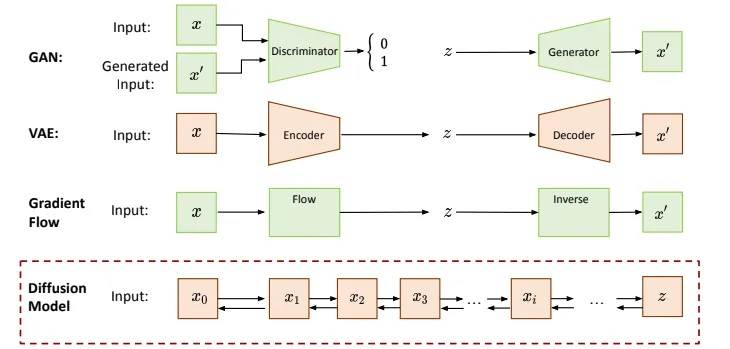
Diffusion Model
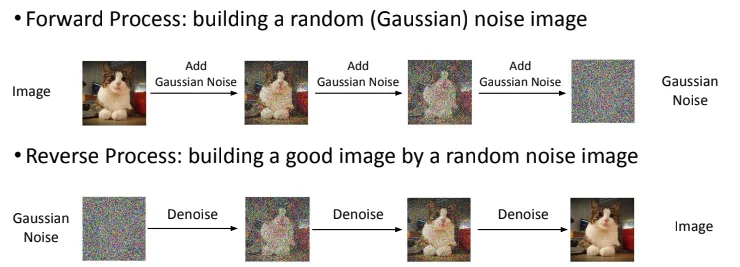
- Forward Process:
- build a random Gaussian noise image
- generate training data & labels for reverse process
- Reverse Process:
- train noise predictor (Unet) to generate denoised image
- input: noise image & step number (to indicate the amount of noise per image step)
- output: denoised image
- Why need T steps?
- break down a hard problem
- easier to inject conditions (i.e text prompt) gradually
- Noise predictor loss function: distance between predicted image and ground truth (from forward process)
- Text-to-Image: in reverse process, add text prompt as an input.
- 3 inputs: noise image, step number, text prompt
Stable (Latent) Diffusion
Why need?
- DM often operate on high dimension pixel space costly computation
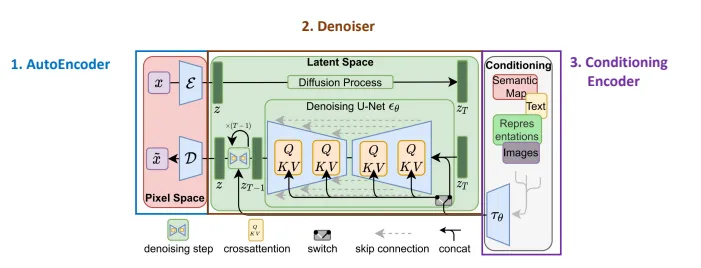
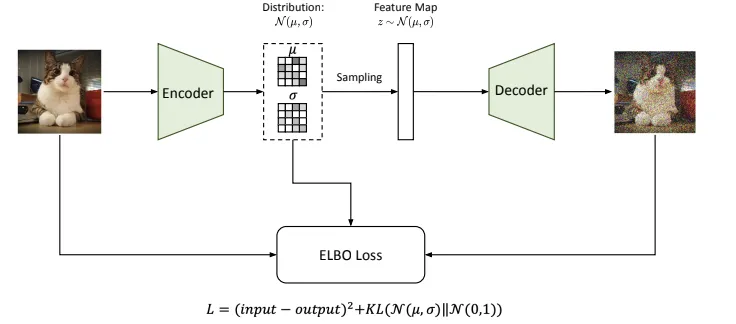
AutoEncoder
- implemented as Variational Autoencoder (VAE)
- handle perceptual image compression (reduces the dimension of input data)
Denoiser
- latent diffusion models
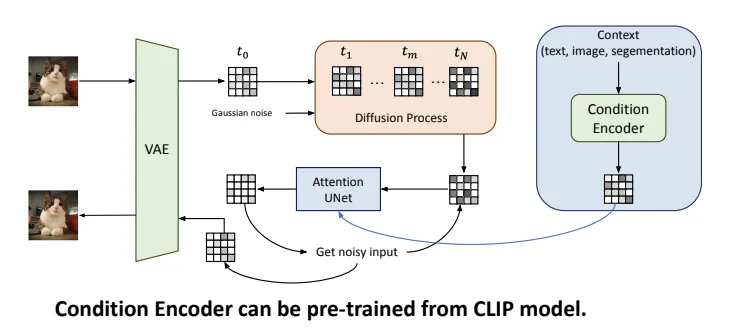
Condition Encoder
- arbutrary encoder that produces a sequence of tokens to generate embeddings for denoiser
Dall-E 2
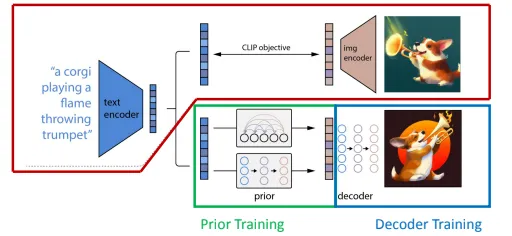
- 4 parts:
- text encoder & image encoder (pretrained from CLIP)
- prior training (transform text embedding to image embedding)
- decoder training (produces image conditioned on CLIP image embeddings and text captions)
- inference (delete CLIP image encoder, save CLIP text encoder)
[CS5242] Stable Diffusion
https://itsjeremyhsieh.github.io/posts/cs5242-10-stable-diffusion/